官方微信:日成最新資訊
官方微信:日成最新資訊 移動官網(wǎng)
移動官網(wǎng) 官方商城
官方商城伺服系統(tǒng)是機(jī)電產(chǎn)品中的重要環(huán)節(jié),它能提供最高水平的動態(tài)響應(yīng)和扭矩密度,所以拖動系統(tǒng)的發(fā)展趨勢是用交流伺服驅(qū)動取替?zhèn)鹘y(tǒng)的液壓、直流、步進(jìn)和AC變頻調(diào)速驅(qū)動,以便使系統(tǒng)性能達(dá)到一個全新的水平,包括更短的周期、更高的生產(chǎn)率、更好的可靠性和更長的壽命。為了實(shí)現(xiàn)伺服電機(jī)的更好性能,就必須對伺服電機(jī)的一些使用特點(diǎn)有所了解。本文將淺析伺服電機(jī)在使用中的常見問題。
問題一
噪聲,不穩(wěn)定
有些使用者在一些機(jī)械上使用伺服電機(jī)時,經(jīng)常會發(fā)生噪聲過大,電機(jī)帶動負(fù)載運(yùn)轉(zhuǎn)不穩(wěn)定等現(xiàn)象,出現(xiàn)此問題時,許多使用者的第一反應(yīng)就是伺服電機(jī)質(zhì)量不好,因?yàn)橛袝r換成步進(jìn)電機(jī)或是變頻電機(jī)來拖動負(fù)載,噪聲和不穩(wěn)定現(xiàn)象卻反而小很多。表面上看,確實(shí)是伺服電機(jī)的原故,但我們仔細(xì)分析伺服電機(jī)的工作原理后,會發(fā)現(xiàn)這種結(jié)論是完全錯誤的。
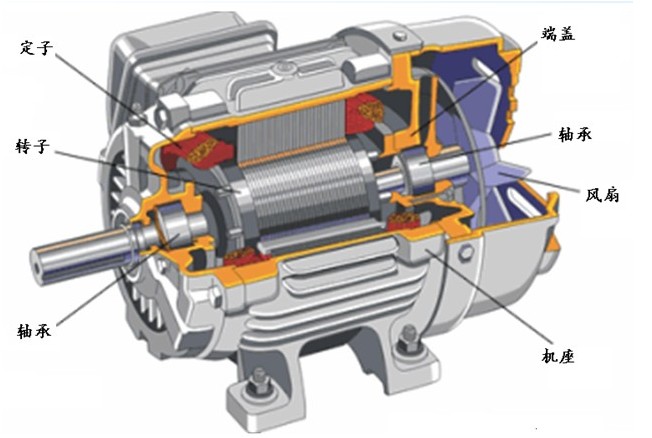
交流伺服系統(tǒng)包括:伺服驅(qū)動、伺服電機(jī)和一個反饋傳感器(一般伺服電機(jī)自帶光學(xué)偏碼器)。所有這些部件都在一個控制閉環(huán)系統(tǒng)中運(yùn)行:驅(qū)動器從外部接收參數(shù)信息,然后將一定電流輸送給電機(jī),通過電機(jī)轉(zhuǎn)換成扭矩帶動負(fù)載,負(fù)載根據(jù)它自己的特性進(jìn)行動作或加減速,傳感器測量負(fù)載的位置,使驅(qū)動裝置對設(shè)定信息值和實(shí)際位置值進(jìn)行比較,然后通過改變電機(jī)電流使實(shí)際位置值和設(shè)定信息值保持一致,當(dāng)負(fù)載突然變化引起速度變化時,偏碼器獲知這種速度變化后會馬上反應(yīng)給伺服驅(qū)動器,驅(qū)動器又通過改變提供給伺服電機(jī)的電流值來滿足負(fù)載的變化,并重新返回到設(shè)定的速度。交流伺服系統(tǒng)是一個響應(yīng)非常高的全閉環(huán)系統(tǒng),負(fù)載波動和速度較正之間的時間滯后響應(yīng)是非常快的,此時,真正限制了系統(tǒng)響應(yīng)效果的是機(jī)械連接裝置的傳遞時間。
舉一個簡單例子:有一臺機(jī)械,是用伺服電機(jī)通過V形帶傳動一個恒定速度、大慣性的負(fù)載。整個系統(tǒng)需要獲得恒定的速度和較快的響應(yīng)特性,分析其動作過程:
當(dāng)驅(qū)動器將電流送到電機(jī)時,電機(jī)立即產(chǎn)生扭矩;一開始,由于V形帶會有彈性,負(fù)載不會加速到象電機(jī)那樣快;伺服電機(jī)會比負(fù)載提前到達(dá)設(shè)定的速度,此時裝在電機(jī)上的偏碼器會削弱電流,繼而削弱扭矩;隨著V型帶張力的不斷增加會使電機(jī)速度變慢,此時驅(qū)動器又會去增加電流,周而復(fù)始。
在此例中,系統(tǒng)是振蕩的,電機(jī)扭矩是波動的,負(fù)載速度也隨之波動。其結(jié)果當(dāng)然會是噪音、磨損、不穩(wěn)定了。不過,這都不是由伺服電機(jī)引起的,這種噪聲和不穩(wěn)定性,是來源于機(jī)械傳動裝置,是由于伺服系統(tǒng)反應(yīng)速度(高)與機(jī)械傳遞或者反應(yīng)時間(較長)不相匹配而引起的,即伺服電機(jī)響應(yīng)快于系統(tǒng)調(diào)整新的扭矩所需的時間。
找到了問題根源所在,再來解決當(dāng)然就容易多了,針對以上例子,您可以:
(1)增加機(jī)械剛性和降低系統(tǒng)的慣性,減少機(jī)械傳動部位的響應(yīng)時間,如把V形帶更換成直接絲桿傳動或用齒輪箱代替V型帶。
(2)降低伺服系統(tǒng)的響應(yīng)速度,減少伺服系統(tǒng)的控制帶寬,如降低伺服系統(tǒng)的增益參數(shù)值。
當(dāng)然,以上只是噪起,不穩(wěn)定的原因之一,針對不同的原因,會有不同的解決辦法,如由機(jī)械共振引起的噪聲,在伺服方面可采取共振抑制,低通濾波等方法,總之,噪聲和不穩(wěn)定的原因,基本上都不會是由于伺服電機(jī)本身所造成。
問題二
慣性匹配
在伺服系統(tǒng)選型及調(diào)試中,常會碰到慣量問題!具體表現(xiàn)為:
1、在伺服系統(tǒng)選型時,除考慮電機(jī)的扭矩和額定速度等等因素外,我們還需要先計(jì)算得知機(jī)械系統(tǒng)換算到電機(jī)軸的慣量,再根據(jù)機(jī)械的實(shí)際動作要求及加工件質(zhì)量要求來具體選擇具有合適慣量大小的電機(jī);
2、在調(diào)試時(手動模式下),正確設(shè)定慣量比參數(shù)是充分發(fā)揮機(jī)械及伺服系統(tǒng)最佳效能的前題,此點(diǎn)在要求高速高精度的系統(tǒng)上表現(xiàn)由為突出(臺達(dá)伺服慣量比參數(shù)為1-37,JL/JM)。這樣,就有了慣量匹配的問題!
問題三
伺服電機(jī)選型
在選擇好機(jī)械傳動方案以后,就必須對伺服電機(jī)的型號和大小進(jìn)行選擇和確認(rèn)。
(1)選型條件:一般情況下,選擇伺服電機(jī)需滿足下列情況:
1.馬達(dá)最大轉(zhuǎn)速系統(tǒng)所需之最高移動轉(zhuǎn)速。
2.馬達(dá)的轉(zhuǎn)子慣量與負(fù)載慣量相匹配。
3.連續(xù)負(fù)載工作扭力≦馬達(dá)額定扭力。
4.馬達(dá)最大輸出扭力>系統(tǒng)所需最大扭力(加速時扭力)。
(2)選型計(jì)算:
1.慣量匹配計(jì)算(JL/JM)。
2.回轉(zhuǎn)速度計(jì)算(負(fù)載端轉(zhuǎn)速,馬達(dá)端轉(zhuǎn)速)。
負(fù)載扭矩計(jì)算(連續(xù)負(fù)載工作扭矩,加速時扭矩)。