官方微信:日成最新資訊
官方微信:日成最新資訊 移動官網
移動官網 官方商城
官方商城電動機再生制動
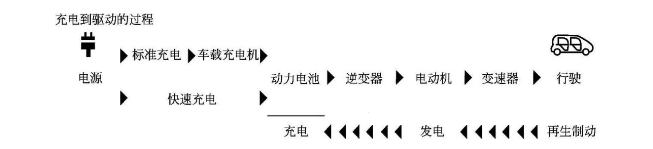
再生制動是電動汽車所獨有的,在減速制動(制動或者下坡)時將車輛的部分動能轉化為電能,轉化的電能儲存在儲存裝置中,如各種蓄電池、超級電容器和高速飛輪,最終增加電動汽車的續駛里程。
若儲能器已經被完全充滿,再生制動就無法實現,所需的制動力就只能由常規的液壓制動系統來提供。現在幾乎所有的電動汽車都安裝了再生液壓制動系統,從而可以實現節約制動能、回收部分制動動能,并為駕駛員提供常規制動性能。如圖6-3所示為電動汽車的能量轉換。
當電動汽車減速、在公路上放松加速踏板巡航或踩下制動踏板停車時,再生制動系統啟動。正常減速時,再生制動的力矩一般保持在最大負荷狀態;
電動汽車高速巡航時,其驅動電動機通常是在恒功率狀態下運行,驅動力矩與驅動電動機的轉速或者車輛速度成反比。所以,恒功率下驅動電動機的轉速越高,再生制動的能力就越低。
另外,當踩下制動踏板時,驅動電動機一般運行在低速狀態。因為在低速時,電動汽車的動能不足以為驅動電動機提供能量來產生最大的制動力矩,所以再生制動能力也就會隨著車速降低而減小。如圖6-4所示為再生制動和液壓制動的車速變化曲線,電動汽車的再生制動力矩一般不能像傳統燃油車中的制動系統一樣提供足夠的制動減速度。
因此,在電動汽車中,再生制動和液壓制動系統一般共同存在。不過應該注意,只有當再生制動已經達到了最大制動能力而且無法滿足制動要求時,液壓制動才起作用。
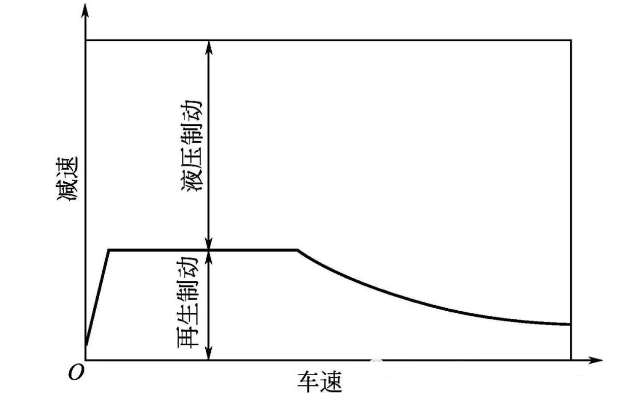
圖6-4 再生制動和液壓制動的車速變化曲線
再生液壓混合制動系統是電動汽車所獨有的,燃油車沒有,再生制動和液壓制動之間的協調是問題的關鍵所在,而且,應該考慮下列特殊要求:
為了使駕駛員在制動時有一種平順感,液壓制動力矩應該可以按照再生制動力矩的變化進行控制,最終使駕駛員得到所希望的總力矩。同時,液壓制動的控制不應引起制動踏板的沖擊,因此不會給駕駛員一種不正常的感覺。可利用ABS擴展的ESP功能實現電動泵的油壓提高。
這要求ABS的ESP模塊和整車控制系統要進行通信,可以將再生制動軟件寫入ABS模塊,驅動油泵、控制摩擦制動和控制制動助力的真空源。ABS和整車控制器通信控制再生制動的強度即可。液壓制動力矩是電控的,將產生的液壓傳至制動輪缸上,因而再生液壓制動系統需要有避免制動失效的機構。
為了提高系統的可靠性,滿足安全標準,系統通常采用雙管路制動,當其中一條管路失效時,另一條管路必須能提供足夠的制動力。為了使車輛可以穩定地制動,前后車輪上的制動力必須很好地平衡分配。另外,為了防止汽車發生滑移,加在前后輪上的最大制動力應該低于允許的最大值(主要由滾動阻力系數決定)。
電動汽車采用的再生液壓混合制動系統即可滿足以上要求,其基本結構如圖6-5所示。駕駛員踩下制動踏板后,電動泵使制動液增壓產生所需的制動力。制動控制和電動機控制協同工作,確定電動汽車上的再生制動力矩與前后輪上的液壓制動力。
再生制動時,再生制動控制回收再生制動能量,并且反充至蓄電池中。電動汽車上的ABS及其制動比例控制閥(ABS的擴展功能EBD元件)的作用和傳統燃油車上的相同,即產生最大的制動力。電動泵能夠利用現有汽車中ABS的擴展功能中的ESP電動供能泵作為壓力源。
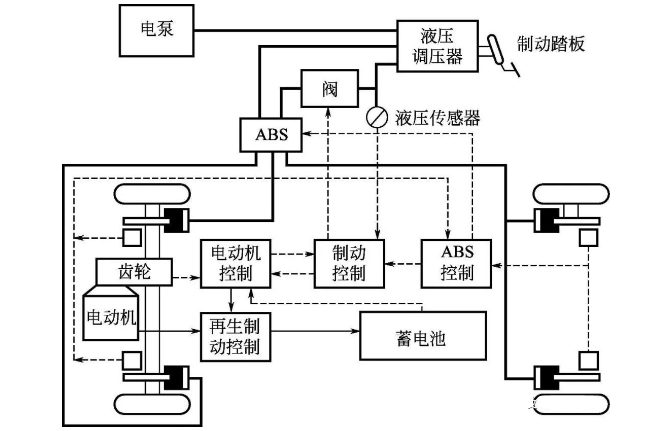
圖6-5 再生液壓混合制動系統的基本結構
電動汽車上的總制動力矩是再生制動力矩與液壓制動力矩之和。它們之間的分配比例關系如圖6-6所示,目的是保持最大再生制動力矩的同時為駕駛員提供和燃油車相同的制動感。當制動踏板力較小時,只有再生制動力矩施加在驅動輪上,才能和制動踏板力成正比。而非驅動輪上的制動力由液壓制動提供,液壓制動力也和制動踏板力成正比。
當制動踏板力超過一定值時,最大再生制動力矩全部加在驅動輪上,同時液壓制動力矩也作用在驅動輪上以得到所需的制動力矩。因而最大再生制動力矩可以保持不變,以便能夠完全回收車輛的動能。
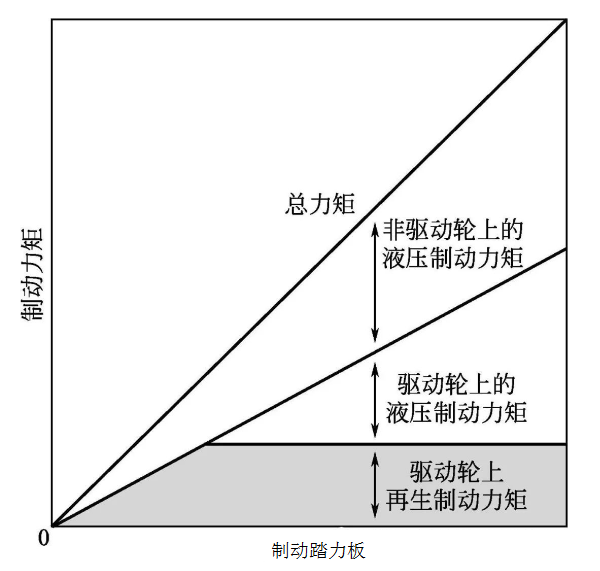
圖6-6 再生制動力矩與液壓制動力矩的分配比例關系
制動系統因制動而造成的管路壓力(或制動踏板踏下深度越深)越高,表示經駕駛員判斷需要的總制動力矩越大,非驅動輪的制動力矩不斷增加,驅動輪的制動力矩也在增加。但摩擦力矩增加得多,再生制動轉矩不增加,甚至還可能減小,這就要求再生制動和ABS系統要協調工作。
在兩前輪獨立、后輪采用低選原則的ABS中,制動壓力傳感器(液壓傳感器)監測制動系統管路的制動壓力(液壓或氣壓),ABS采用車速與壓力傳感器(也可是制動踏板行程開關)采集制動狀態信號,根據車速算出的減速度值與設定的減速度值進行比較,從而對車輛進行控制。
附:ABS(制動防抱死系統)、ESP(電子穩定系統)、EBD(電子制動力分配系統)